專屬小朋友的海洋教育套件,全新科學實作體驗
入門基本款
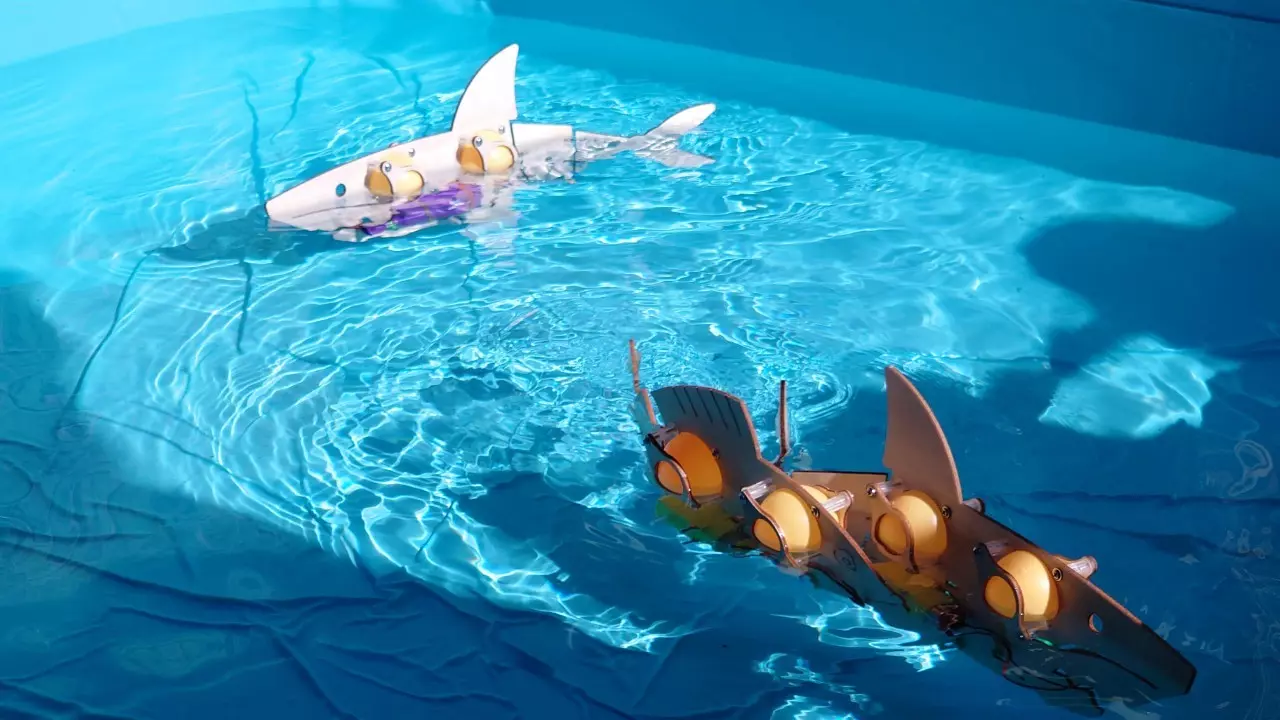
仿生機械魚
進階款

遙控機械鯊魚
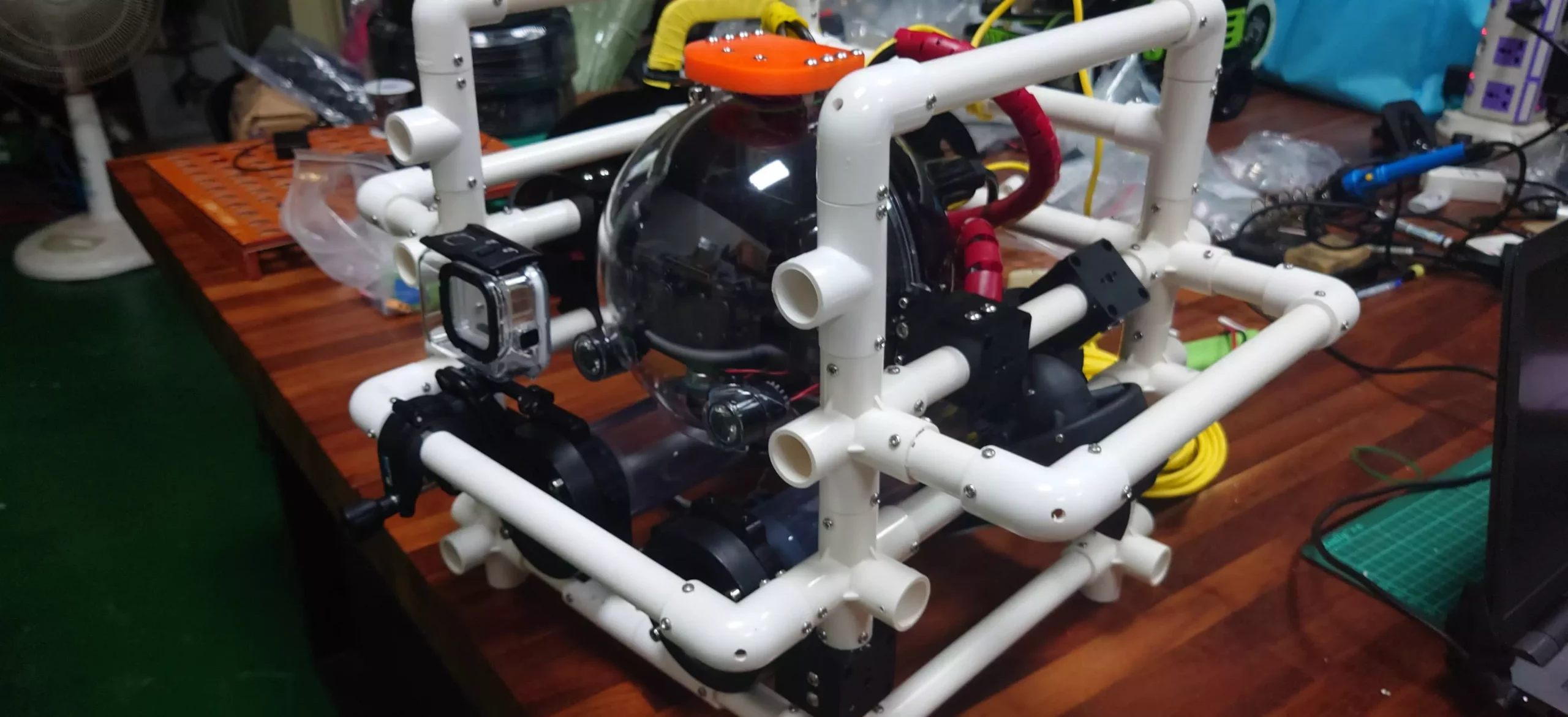
在開發航海家號II的設計階段,為了可以充分利用Asgard防水球殼模組內部空間,ROV MAKER 團隊決定捨棄市面上現有開發版,自行開發水下機器人控制板,內部稱為巴洛克計畫。
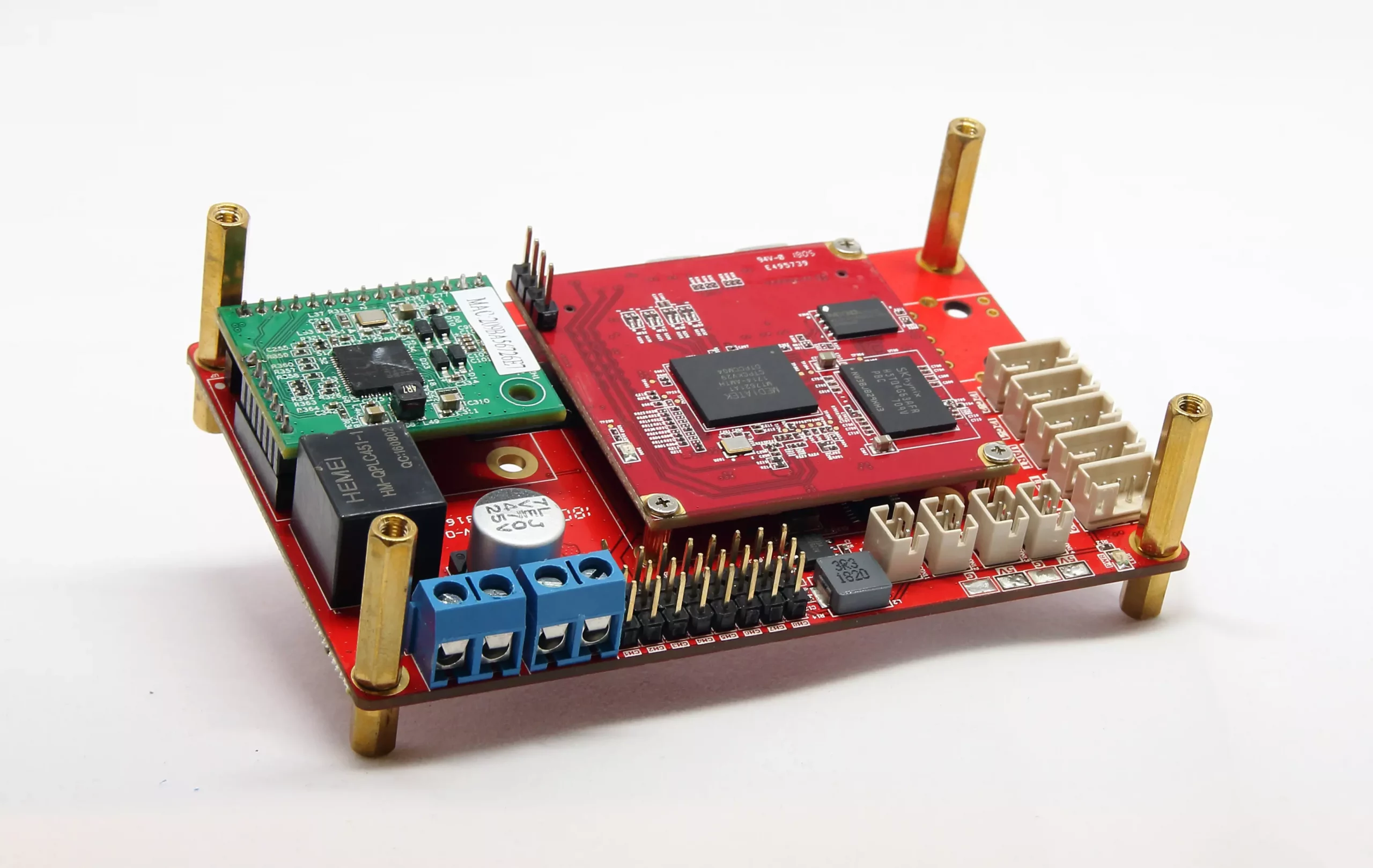
在巴洛克計畫之初,硬體電路設計時面臨了兩個路線之爭 (1)注重多媒體資料效能 (2) 資料路由效能為主。幾經思考後,最終選擇資料路由為首要設計考量。因此巴洛克開發版決定採用MIPS路由器方案。
Linux 是一種 soft-timer的作業系統,無法提供很精準的計時器(Timer)來產生控制硬體的控制信號。為了避免採用Arduno這類開發版的增加空間與硬體成本, 巴洛克版整合PWM IC,其產生的PWM訊號直接控制電子變速器(ESC)或燈光亮度。巴洛克版控制板提供8組PWM信號,滿足目前水下機器人推進器控制需求。
巴洛克控制板內建8G eMMC,除了程式儲存,亦提供足夠儲存空間給影像錄影與照相或其他感測器資料錄製等。
內建兩組 Micro USB 讓巴洛克控制板可以同時支援兩組 USB 介面的網路攝像頭。
內建Mini-PCIE 讓巴洛克版控制板除了透過RJ45進行有線傳輸,亦可透過安裝WIFI模組,進行遠距離無線資料傳輸。
巴洛克控制板亦整合了PLC (Power Line Communication)模組。這讓兩組巴洛克控制板可以透過線路串接成一個網域。這樣的設計,這樣的設計讓巴洛克控制板使用在 (1)水下機器人控制與岸上絞盤組合網域(2) 水上母船與水下機器人組合網域。不論哪種組合,使用者皆可透過WIFI或RJ45連入此網域,並透過PLC模組讓兩個巴洛克電路板可以互相連結傳遞資料。

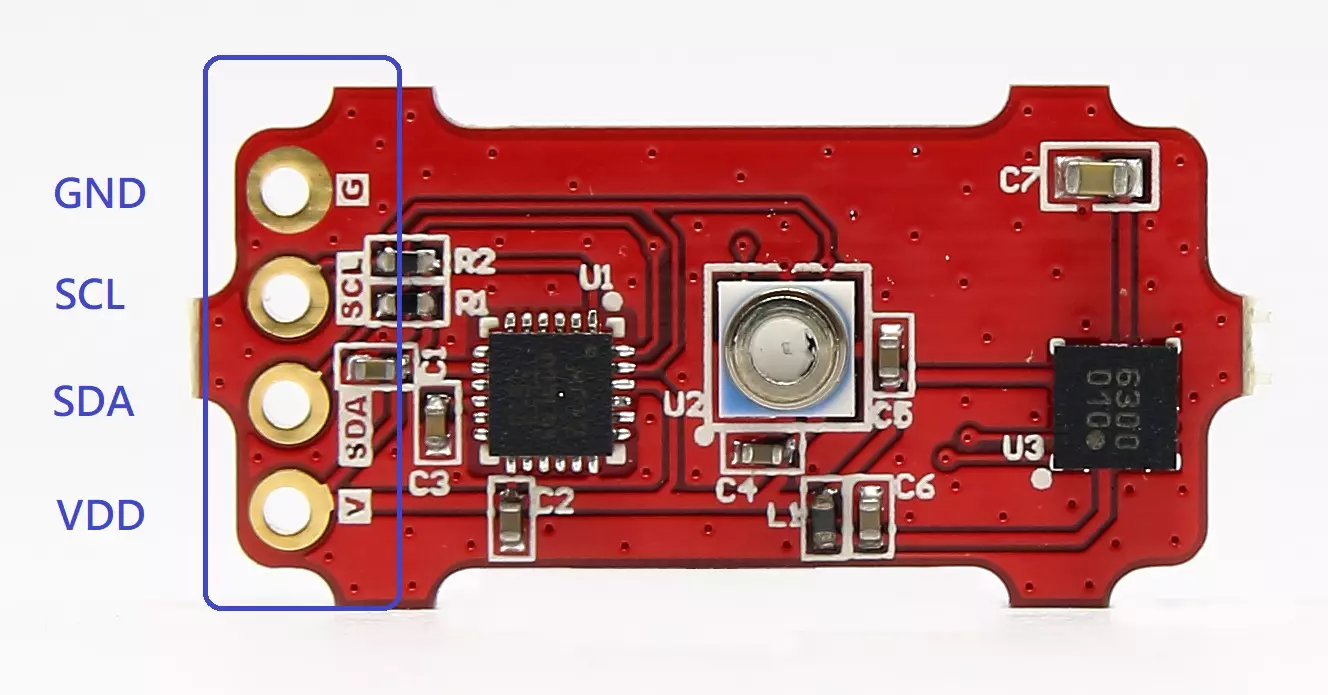
為了讓巴洛克控制板有效控制電子變速器(ESC),ROV MAKER團隊亦開發了其專屬的ESC控制板。一個ESC控制板可同時控制4組ESC。ESC控制板內建電壓電流量測IC,巴洛克控制板可透過I2C介面讀取推進器供給電壓與電流值。
如需了解巴洛克版其他相關技術資料,可參考 巴洛克版使用手冊 。