專屬小朋友的海洋教育套件,全新科學實作體驗
入門基本款
仿生機械魚
進階款

遙控機械鯊魚
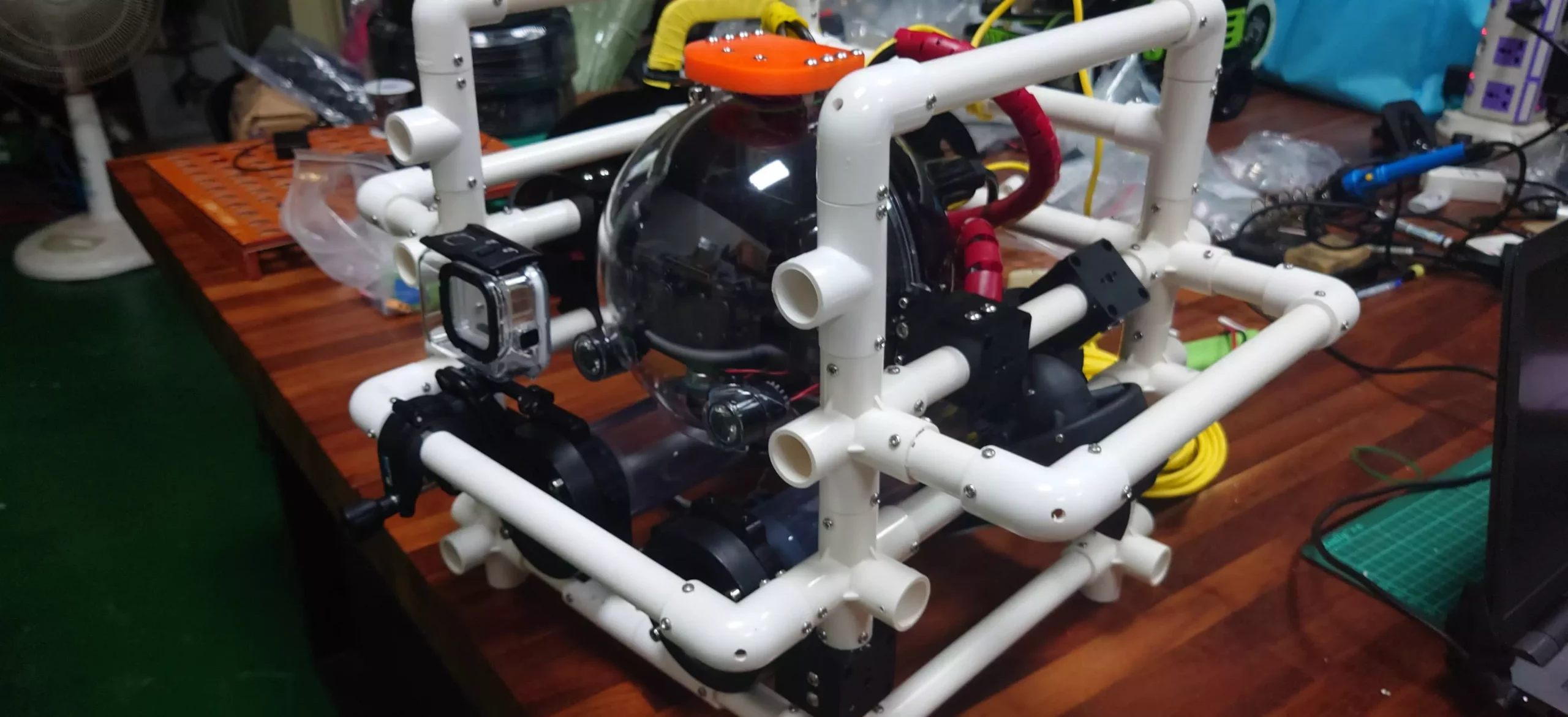
如果你在規劃自做一台屬於自己的水下機器人,而且正在找尋相關感測器模組,MAZU感測模組將是你最佳選擇之一。
在自做水下機器人的過程中,都會面臨到硬體、軟體整合與機構防水設計。此介紹文章說明MAZU 感測模組如何簡化你在DIY過程會面臨的麻煩。
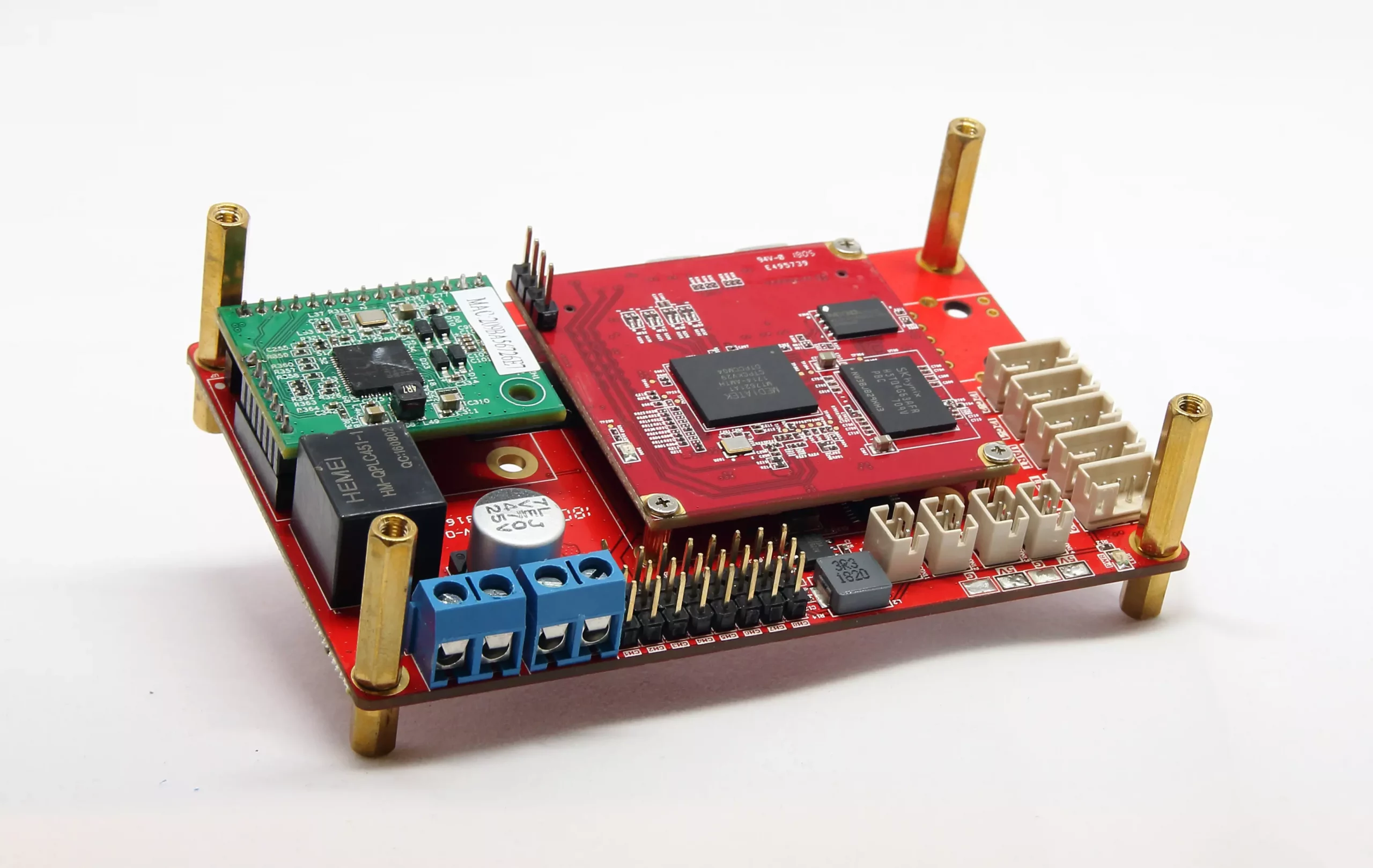
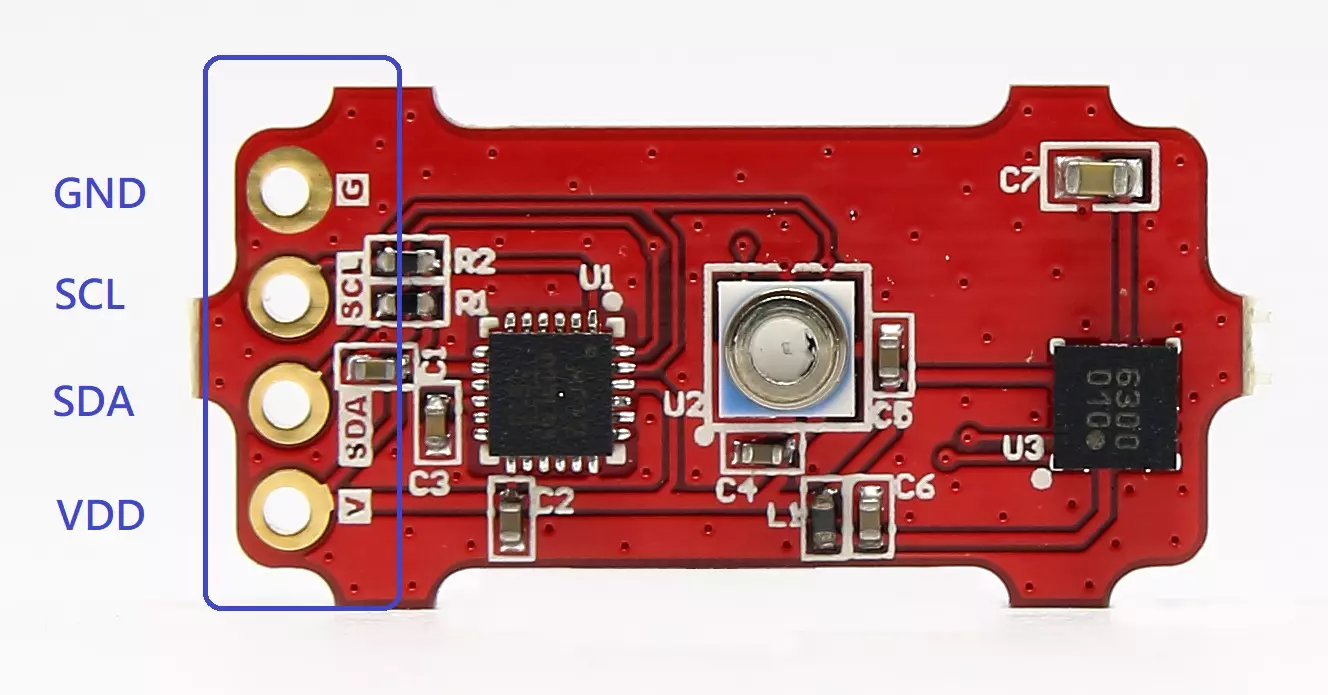
在硬體方面,MAZU 水下感測器模組是特別針對水下機器人DIY所提供的感測器,目前已採用於ROVMAKER自有的航海家號II水下機器人。其上面晶片包含 慣性測量單元(IMU) MPU-9250A 與 深度與溫度感測器 MS5837-30BA。此外為更加入電子羅盤 IST8310 提供水下更佳導航能力。而這些晶片皆透過單一的I2C介面控制。

在軟體開發方面,ROV MAKER團隊提供 MAZU 感測版在航海家號II實現的軟體範例,大大降低你的開發週期。您可以在官網下載區 或直接點此連結下載。
MAZU感測版可以提供的水下導航資料包含:
機構方水方面設計方面,將MAZU焊好電線後,可放置在隨附的壓克力板內,然後注入環氧樹脂A至深度與溫度感測器 MS5837-30BA白色壓力探測器上緣即可。選擇適當環氧樹脂將可使其抗水壓達到65米深以上。此設計可讓MAZU放置在水下機器人在水下65米甚至更深可正常工作。使用者僅需考量MAZU與密封艙的防水設計。

為了讓電子羅盤 IST8310 有更好的表現,建議Mazu模組安裝在機器人的部位盡量不要靠近馬達或相關線路。
MAZU的組裝影片參考如下
以下是航海家號I 安裝MAZU版後 挑戰石門水庫43米深的影片,可以從影片中了解水庫水溫跟深度的變化。在航海家號II,亦實現了紀錄Mazu感測版上的感測器數據,除了以文字檔方式儲存外,亦可將感測器訊息顯示在即時影像上,錄影後供後續研究分析。