專屬小朋友的海洋教育套件,全新科學實作體驗
入門基本款
仿生機械魚
進階款

遙控機械鯊魚
防水需求是水下機器人有別於其他機器人最大不同點,也是創客自作水下機器人最大的挑戰之一。這裡指的防水需求不是消費性產品IP防水等級,而是指水深10米以下到一百米之間的防水。要考量的不只漏水問題甚至還有能承受與水深成正比的水壓。
計算水壓的單位Bar,換算成台灣常見的單位kg/cm2 約略是相等的,1 Bar 約等於1kg/cm2 (1.0197 kg/cm2)。簡單估算,水深每增加10 公尺,約增加1 大氣壓。
一個大氣壓的概念,可以回想一下國中物理提到的馬德堡半球實驗,多個大氣壓可以觀察路邊洗車時高壓水柱噴出的力道。

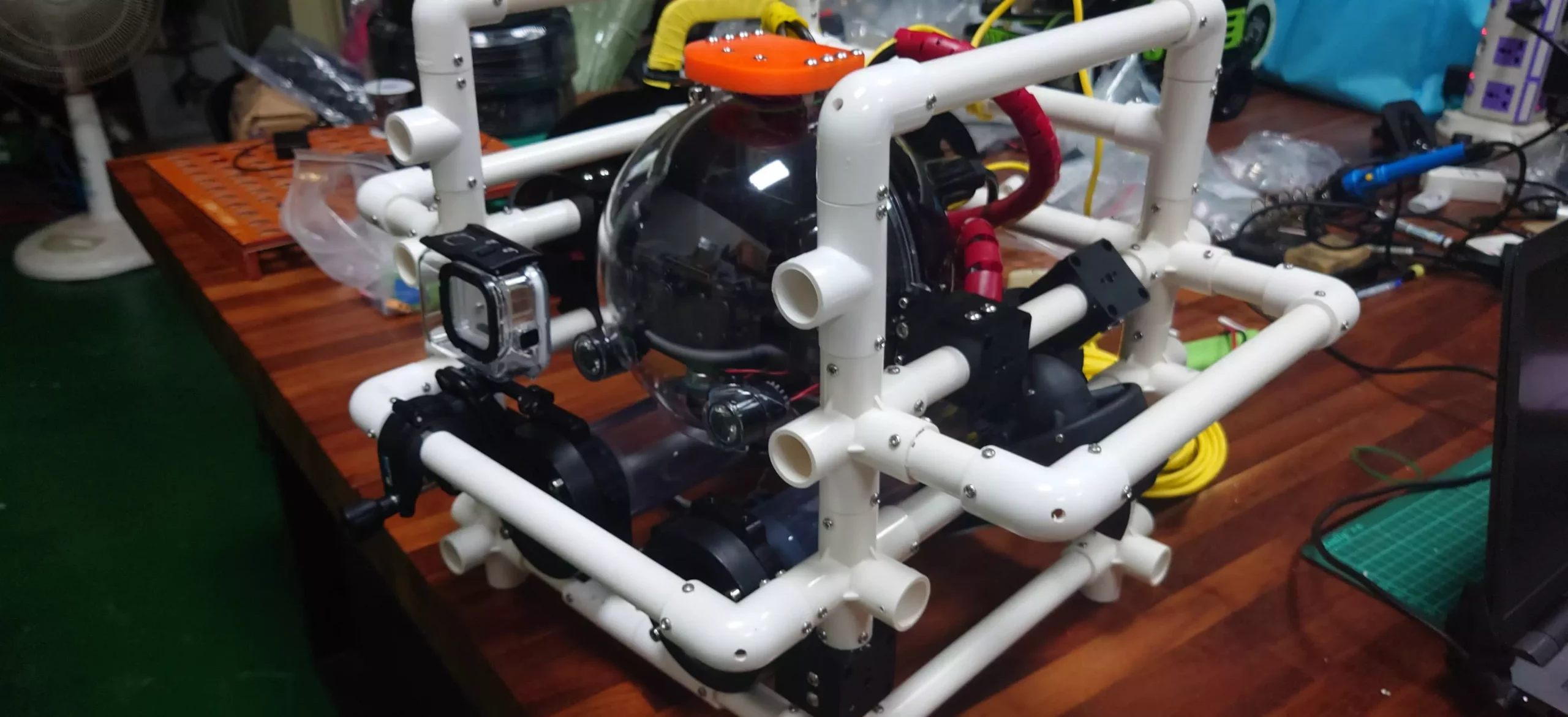
基於防水需求,水下機器人會將相關的控制電路與電池放入所謂的防水密封艙內。為了承受與水深成正比的水壓,水下機器人防水密封艙一般都採用圓筒狀或者圓球。因為這種形狀可以將單位表面所受的壓力均勻分布到密封艙其他表面。


為了更換電池或維修,防水密封艙需要設計可以拆卸的部位,就像上圖圓管兩側的蓋子。可拆卸的部位跟密封艙本體結合處的防水設計便是一個重大考量,基於成本,在水深一百米以上的密封艙一般採用 O-RING側壓方式防水,O-RING日本人稱為油封,歷史悠久但很有效的一種防水設計。

O-RING防水的原理是利用 O-RING受到壓力變形填滿ORING所處溝槽縫隙,達到防水或氣密的目的。O-RING與所處溝槽比例,有相關的設計規範。有興趣的讀者可以參考此連結。
因為O-RING是受壓迫來進行防水,因此,密封艙管本身的內徑精確度也是影響防水重大因素,因為這決定了O-RING受壓迫的程度。早期的航海家號II設計,電池管原先採用一般市售壓克力管。但是壓克力管生產的過程不能保證內徑的公差達到一個精準範圍。因此,僅30cm長的壓克力管兩側內徑公差差距可以大到讓同一個蓋子的O-RING在一側可以防水,另一側卻漏水。
即便航海家號II的電池管改採用半導體設備專用的PVC管,外徑公差在極小範圍,但其內徑公差依舊無法達到防水的公差範圍內。這便需要CNC加工確保內徑公差在誤差範圍內。一般的防水密封艙需要開模具生產或進行CNC二次加工,確保內徑公差範圍。這也是為何水下機器人密封艙價格都偏高的原因之一。
水防水密封艙內的控制電路需要對艙外的馬達進行控制或接收外置的感測器訊號,需將相關控制線外接出防水密封艙,這便需要使用防水接頭。你可以購買相市售的水下機器人專用防水接頭,價格較高同時你必須修改自身防水密封艙架構已符合購買的防水接頭。
針對MAKER販售的防水密封艙都有提供防水接頭,其支援的防水接頭數目決定了水下機器人的複雜度。這類的防水密封艙提供的防水接頭需要創客自行DIY加工。加工的方式就是相關線路穿過防水接頭並確認長度後,使用者本身便必須使用環氧樹脂將防水接頭內的空隙填滿。環氧樹脂的選擇會是重點之一。
以下的影片介紹了上述防水接頭加工的概念
密封艙通常必須預留一個防水接頭作為洩氣閥。由國中物理介紹過的波以耳-馬略特定律(Boyle–Mariotte law)可以得知,當防水蓋蓋住防水密封艙後,艙內的空氣壓力將因體積變小而變大。如果蓋子末入防水艙的體積越大,艙內空氣體將變更小,壓力也越大,如果O-RING跟防水艙管壁的磨擦係數不夠且無漏氣的話,蓋子將可能滑出密封艙少許甚至整個退出。
在防水密封艙完成後,可以進行真空抽氣測試來檢驗氣密性。做為是否可以下水的考量之一。在ROV MAKER生產航海家號II水下機器人的經驗中,真空抽氣測試通過無法保證承受規範內水壓,但是真空抽氣測試沒通過,基本上試過不了水壓測試,而且非常高的機率會漏水(我們的經驗是百分百會漏水)。
以下是ASGARD組裝的真空抽氣測試影片供參考 !!