探索仿生魚奧秘,豐富學習歷程
入門基本款
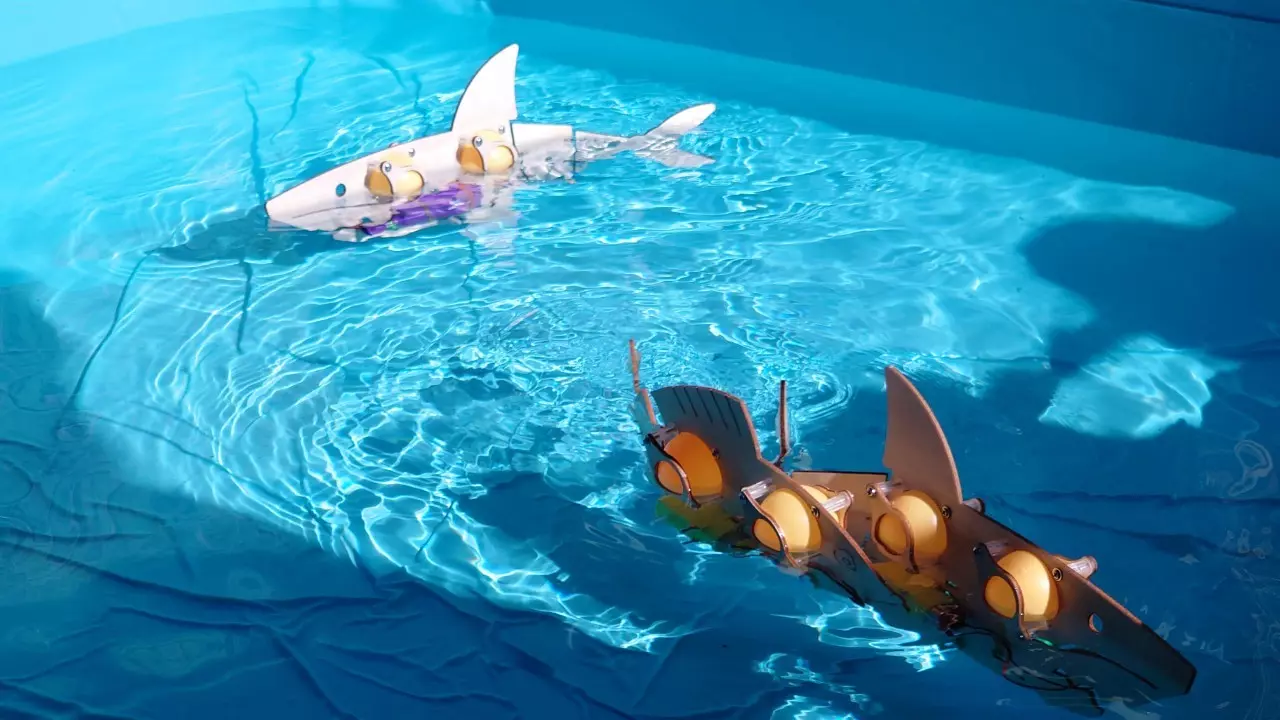
仿生機械魚
進階款

遙控機械鯊魚
你曾想做水下影像分析研究,卻苦於水下機器人的昂貴費用?亦或購買之後卻又要大費周章去讀取影像而苦惱?
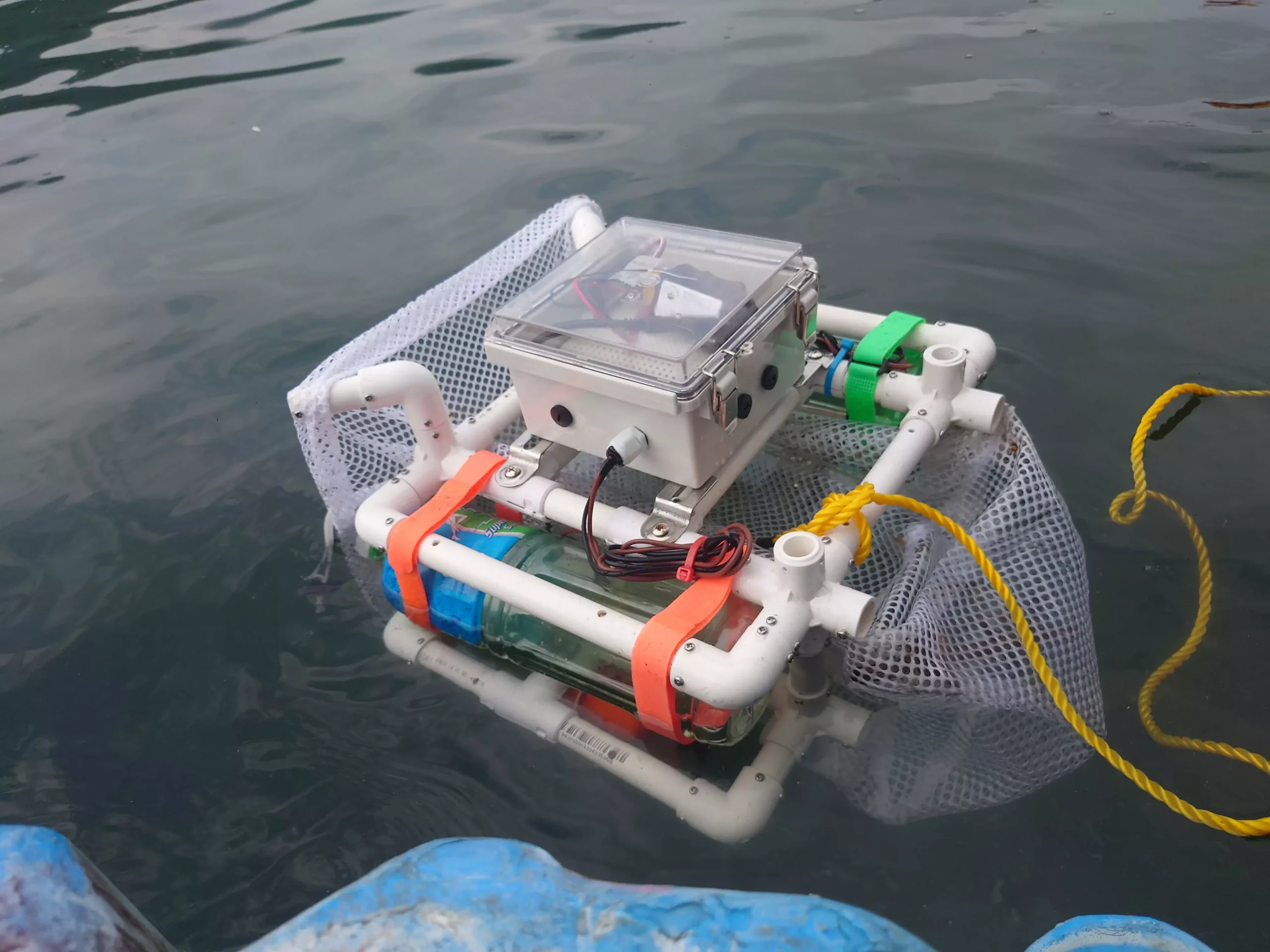
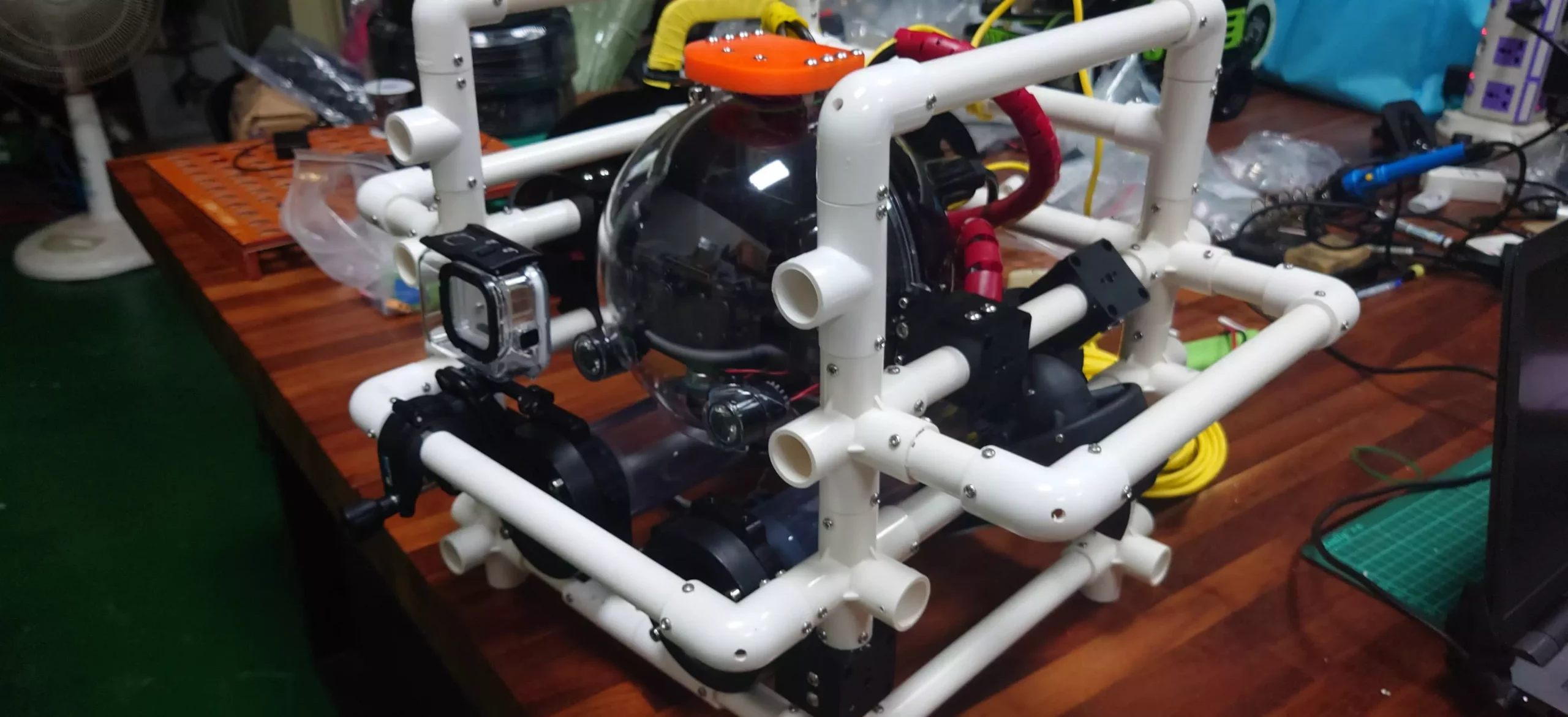
STEAM水管ROV伊帕內瑪套件組搭配HORUS防水鏡頭提供了完整又簡易的水下影像分析方案,適合大學專題或研究生的研究專案。
在2021/10/25,國立中山大學工學院日前舉辦一年一度的聯合專題競賽(新聞連結)。此次競賽中,海軍官校與中山大學機械與機電工程學系皆採用STEAM水管ROV搭配HORUS防水鏡頭方案,皆在此次聯合專題競賽獲得獎項!!!
海軍官校此次參展主題是運用ROV進行水下魚群影像強化之初探(A preliminary Study of Fish Image Enhancement Using Remotely Operated Undrewater Vehcile)。採用STEAM水管ROV搭配HORUS防水鏡頭,收集水下即時影像,並搭配OpenCV進行分析與影像判別。

國立中山大學機械與機電工程學系此次專題主題 水下載具-三維建圖。
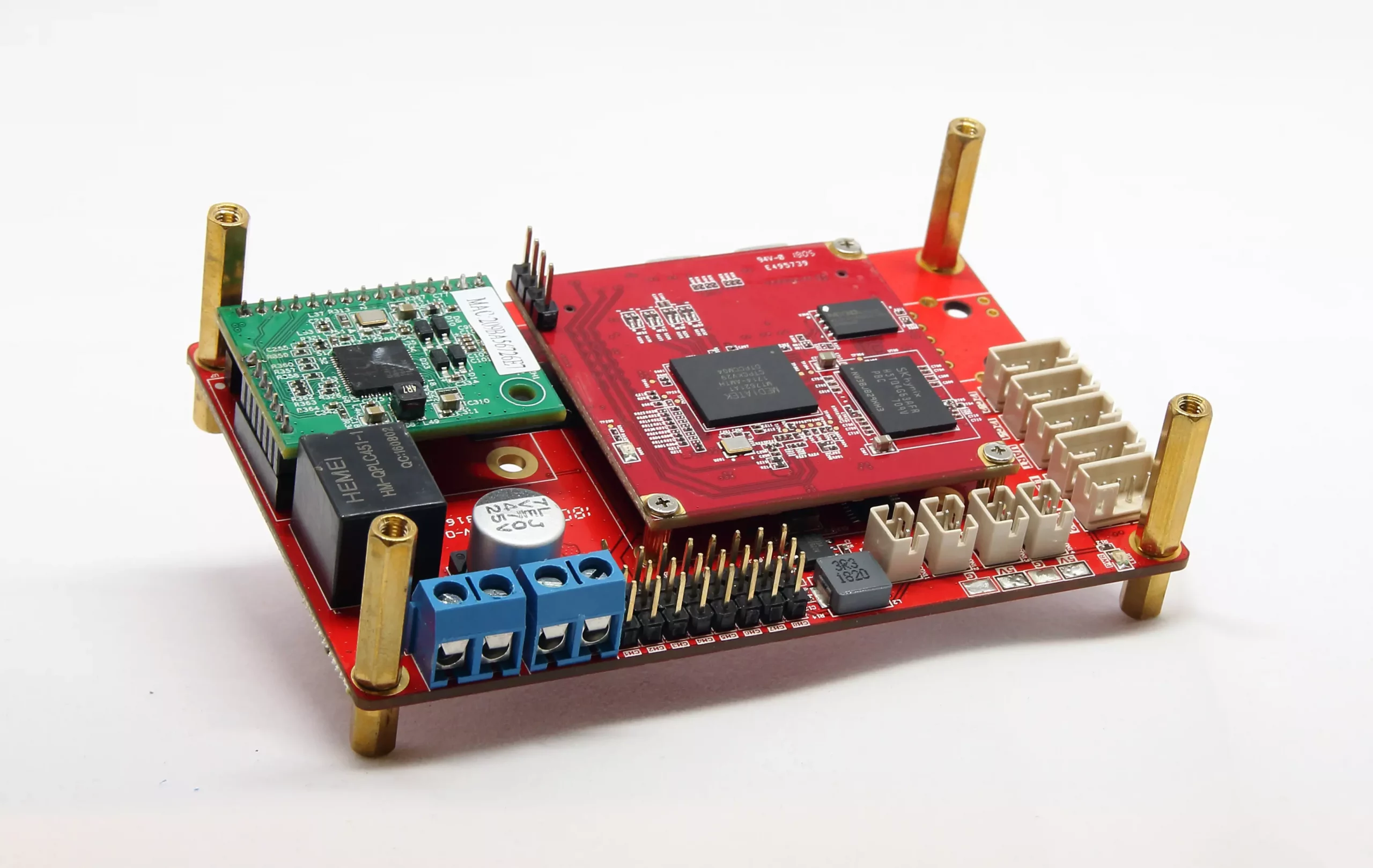
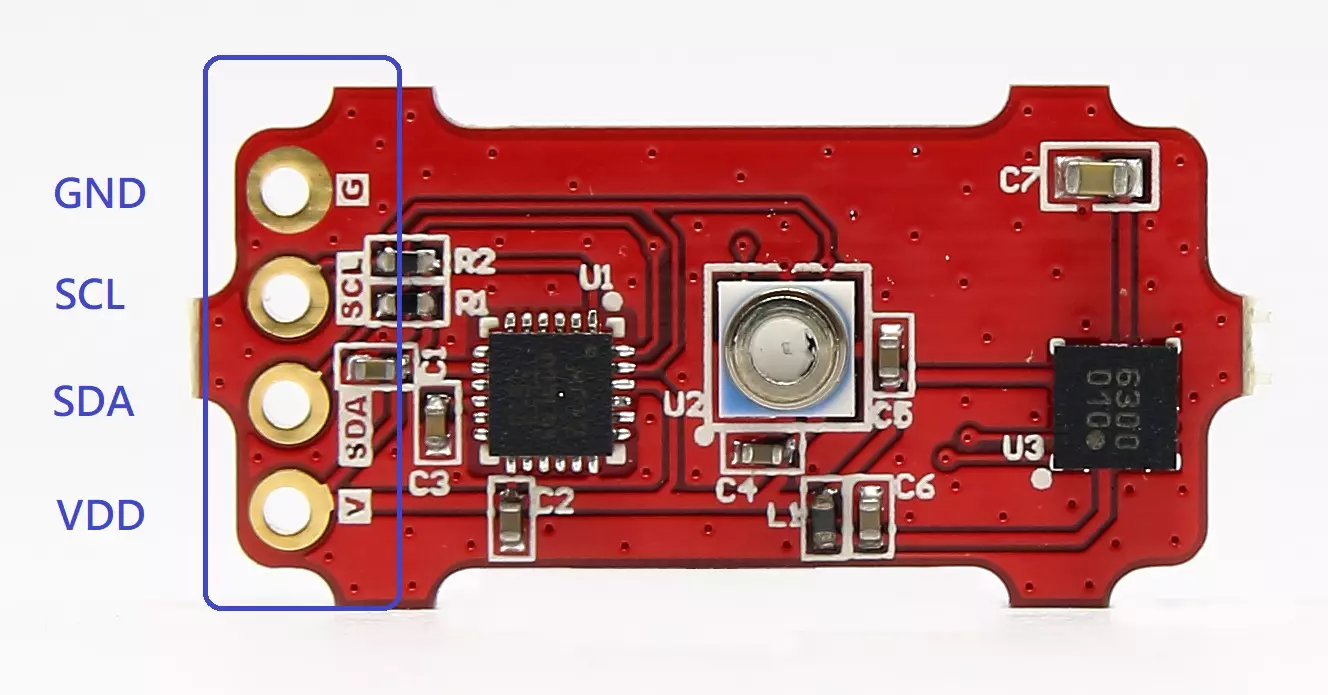
除了採用STEAM水管ROV與HORUS防水鏡頭,並搭配IMU與MATLAB對水下二維物體進行辨識與三維影像見圖。
IMU的使用讓MATLAB可以讀取ROV狀態並進行控制。透過HORUS防水鏡頭收集水下光學資料,使用YOLOv3神經網路架構訓練AI模型以辨識水中物體種類。