ROV enlightenment kit, let students start to contact marine science

BORG CUBE PVC ROV Kit

IPANEMA PVC ROV Kit
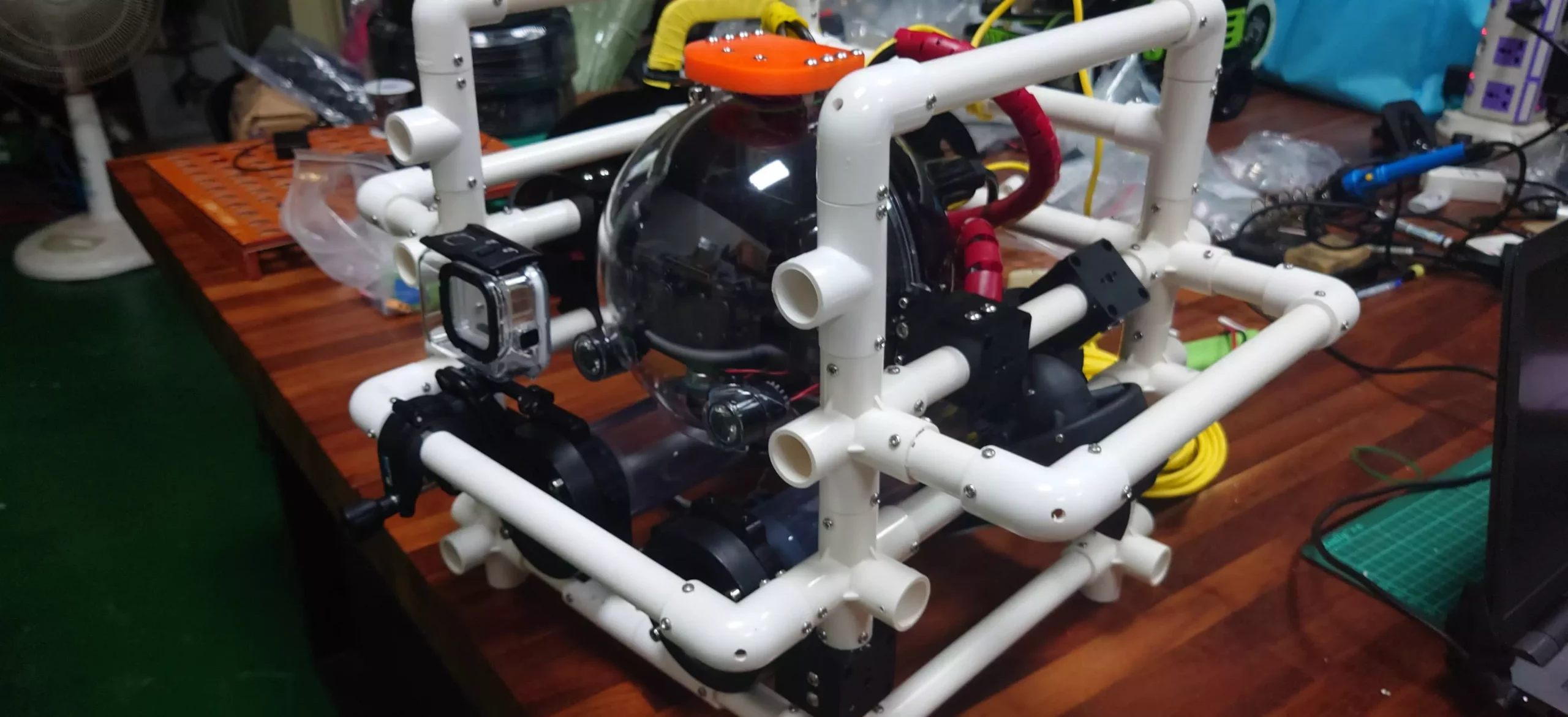
Voyager II is an ROV based on Asgard. To make good use of space in Asgard, the ROV MAKER Team decided to design its own control board instead of using single-board computers available on the market such as raspberry pi. The entire endeavor is called the Baroque project by the ROV MAKER team.
Having surveyed potential hardware solutions, the team narrowed down the choices to: (1) multimedia performance and (2) data routing delay. The team eventually chose the data routing delay and used the MIPS-based router for the Baroque control board.
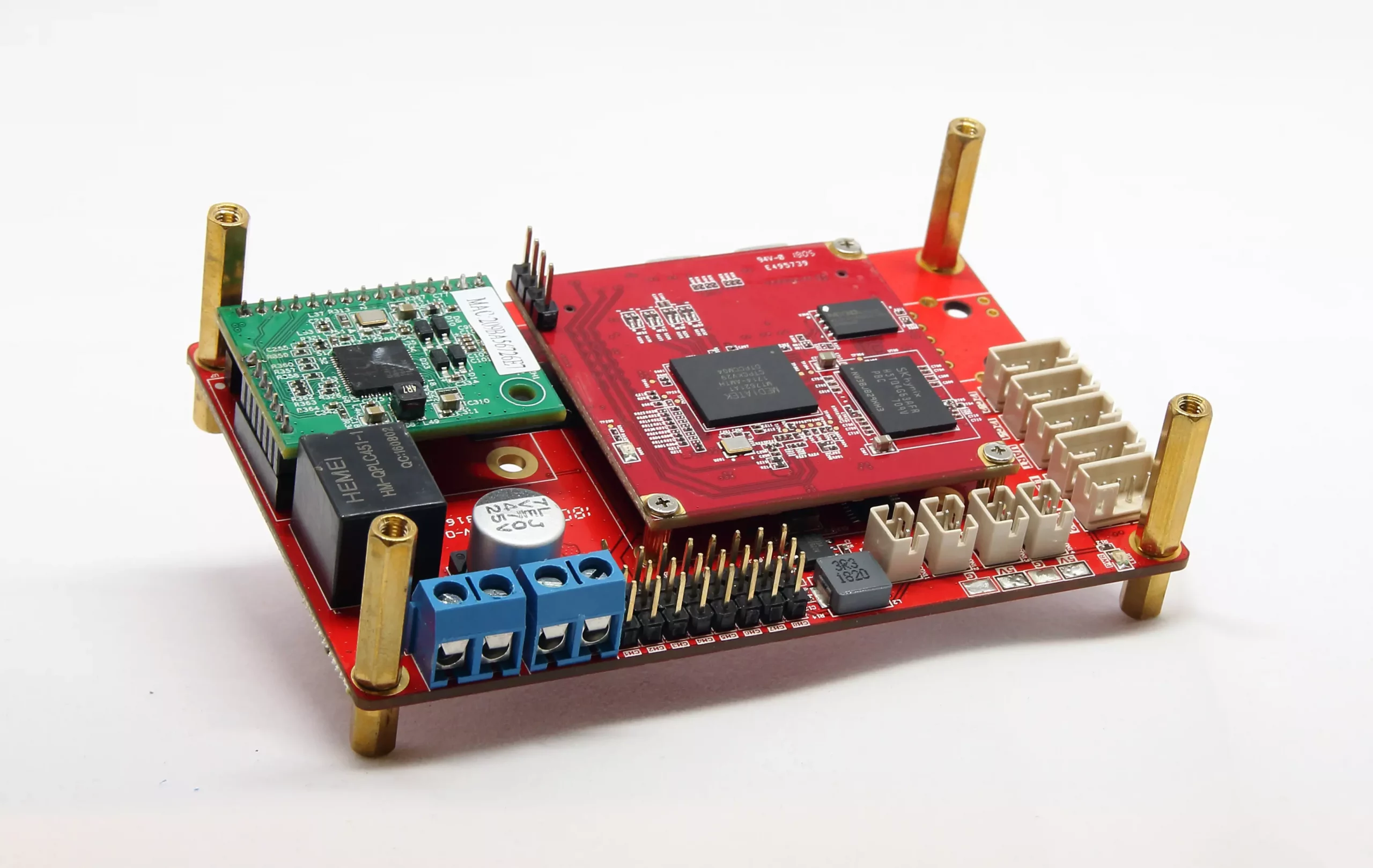
PWM IC is integrated into the Baroque control board to avoid using such auxiliary boards as Arduino. Thus, more space can be made and cost gets reduced. There are 8 PWM outputs to meet the requirements of most ROV design.
The on-board 8G eMMC provides more space for storing source code, video recording, photographing or even navigation data logging.
The two USBs in the Baroque control board makes it possible to support two USB cameras at the same time.
In addition, the Mini-PCIE I/F provides an access port for data transmission through connection to 2.4G/5G WIFI module.
Another feature of the Baroque control board is the use of Power Line Communication (PLC), which uses a power line and can transmit network data farther than the conventional ethernet line. Thanks to the PLC on board, two Baroque control boards can build a local network by twisting a pair of neutral buoyancy lines. The transmission can travel as far as 100 meters.

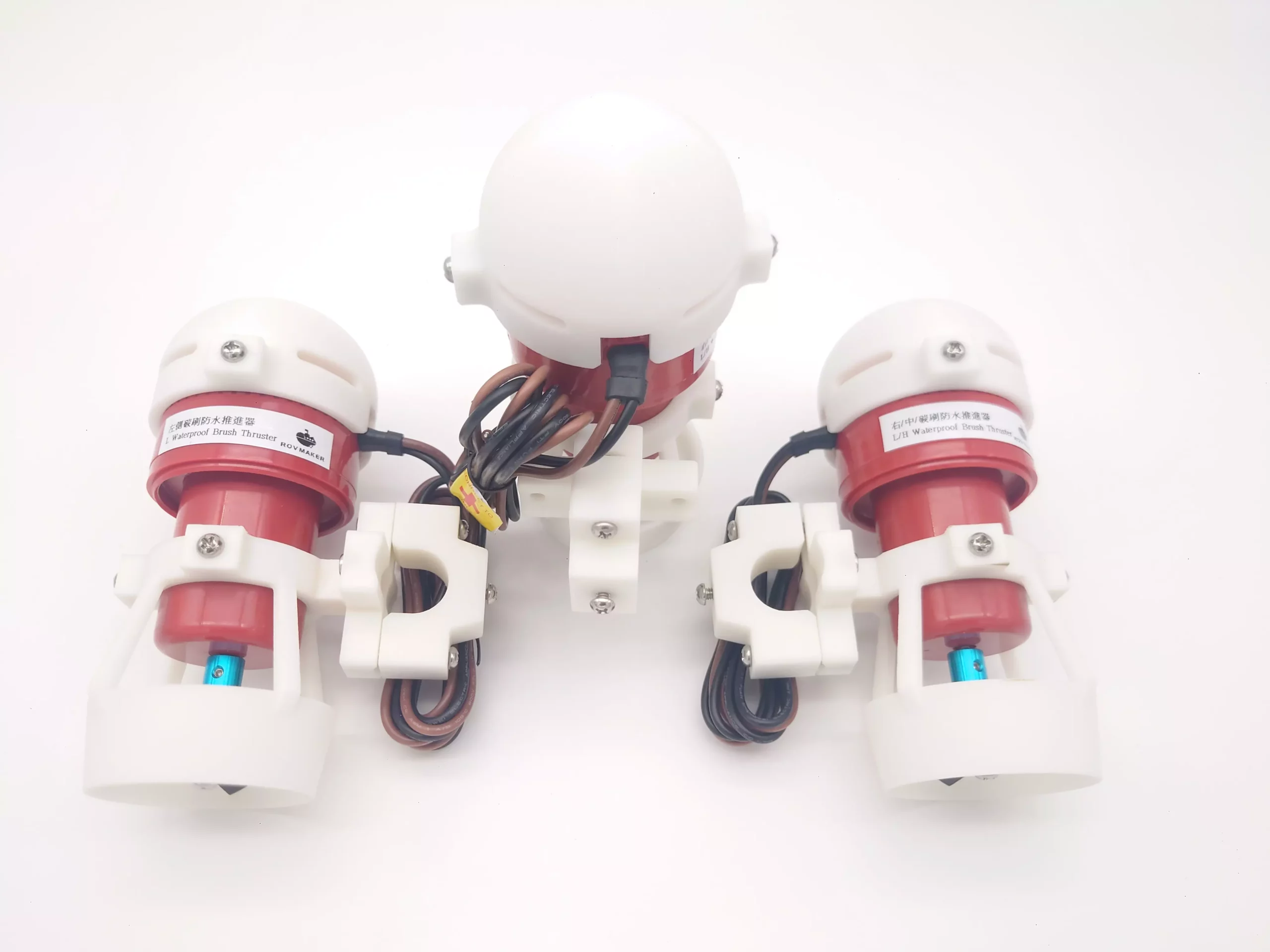
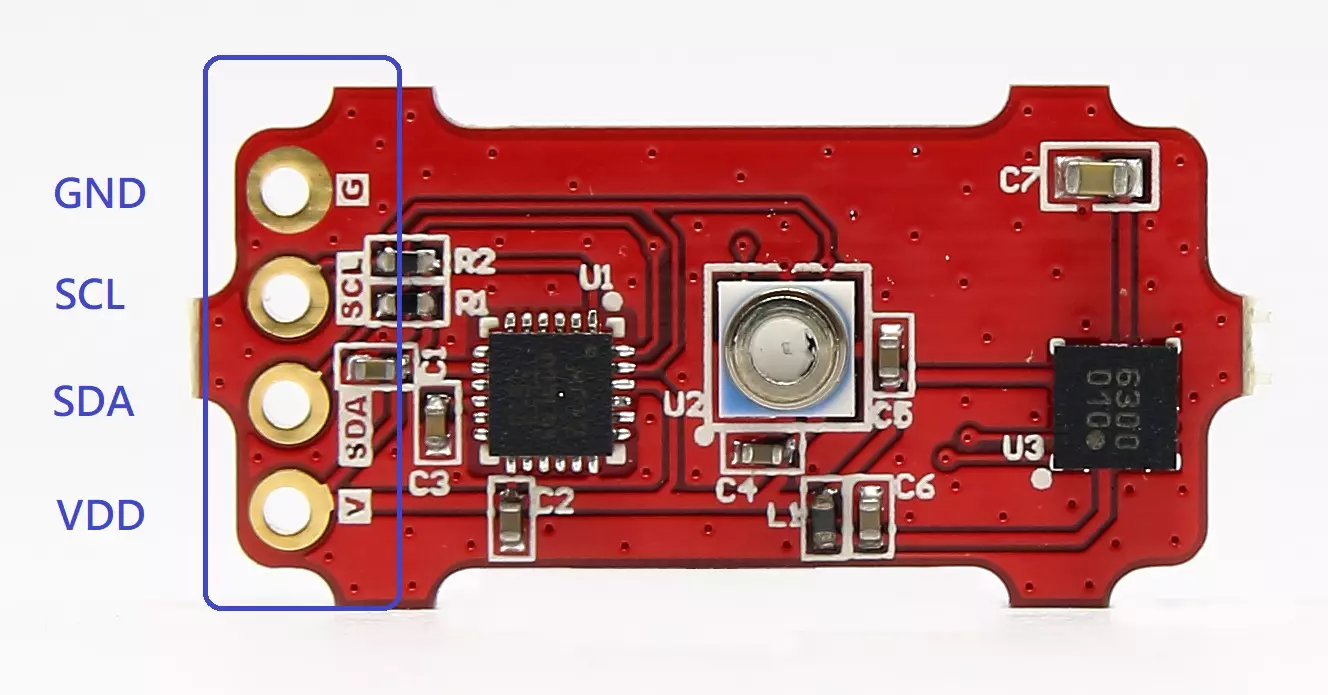
To maximize the efficiency of the electronic speed controller (ESC), ROV MAKER has also developed its own ESC control board, supporting up to 4 ESCs. The ESC control board also integrate power monitor ICs. The Baroque board can monitor the voltage and current through I2C. The ESC control boards helps save much space in the Asgard Ball module.
Please refer Baroque board user guide for more information