ROV enlightenment kit, let students start to contact marine science

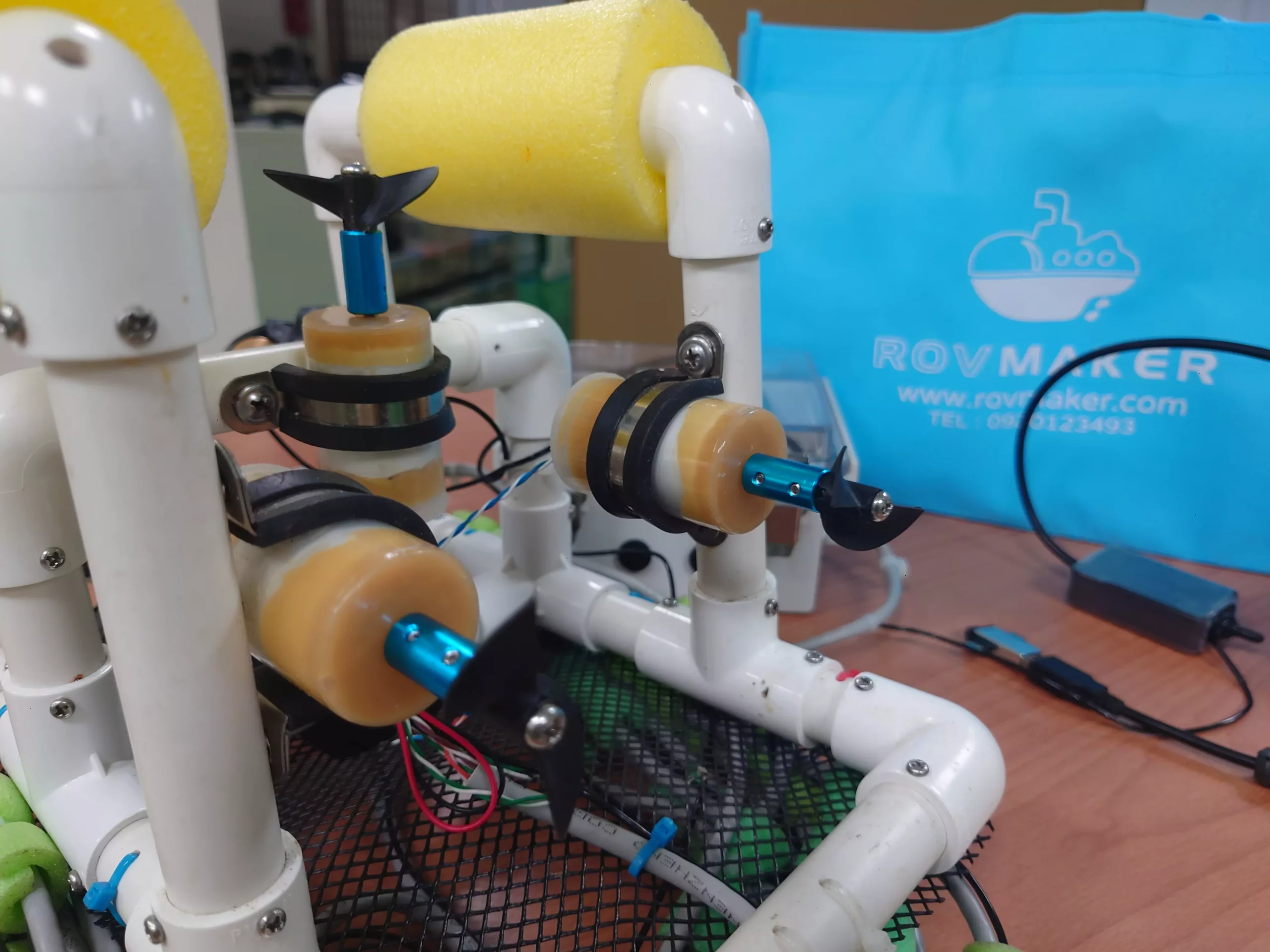
BORG CUBE PVC ROV Kit

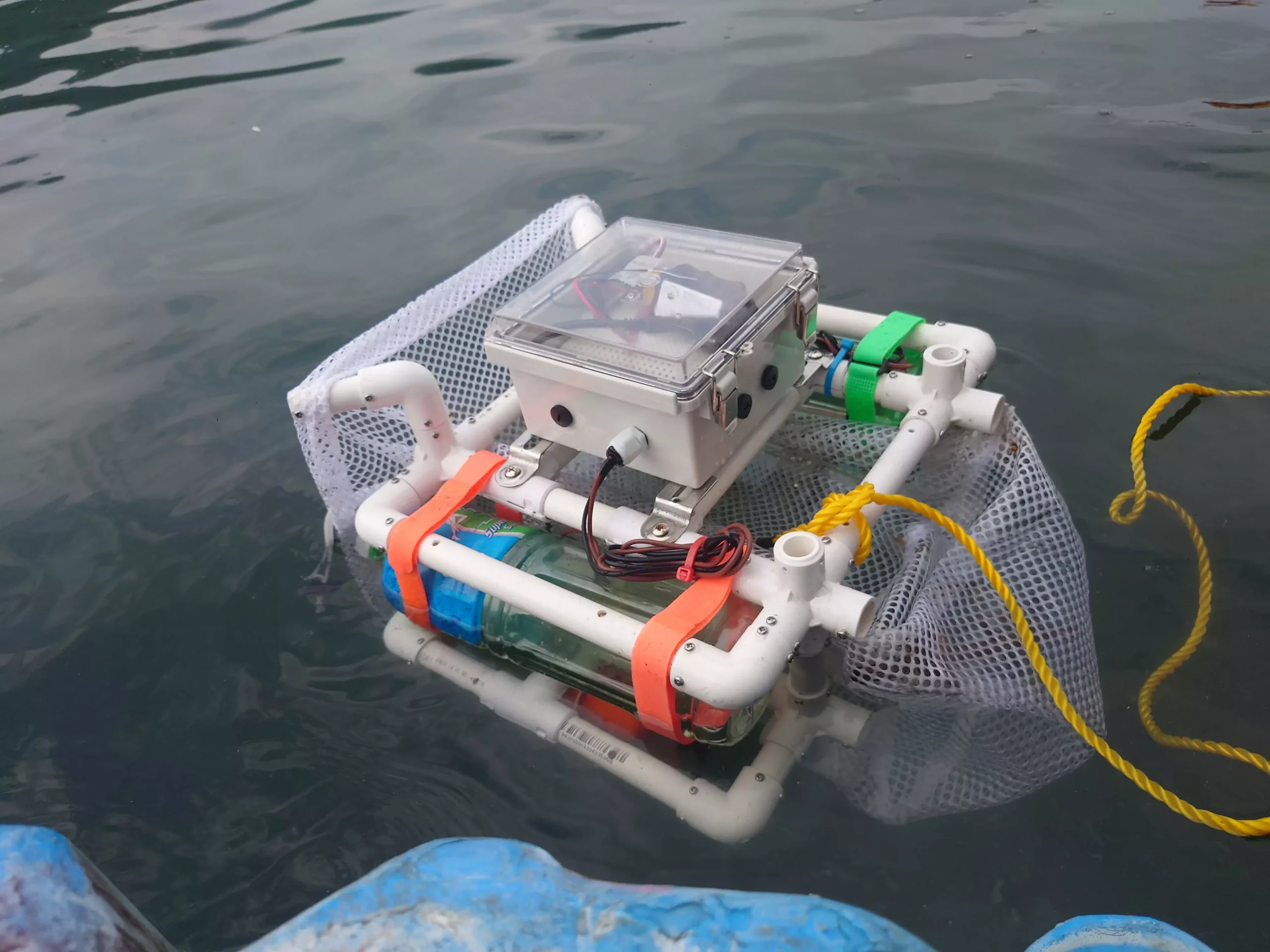
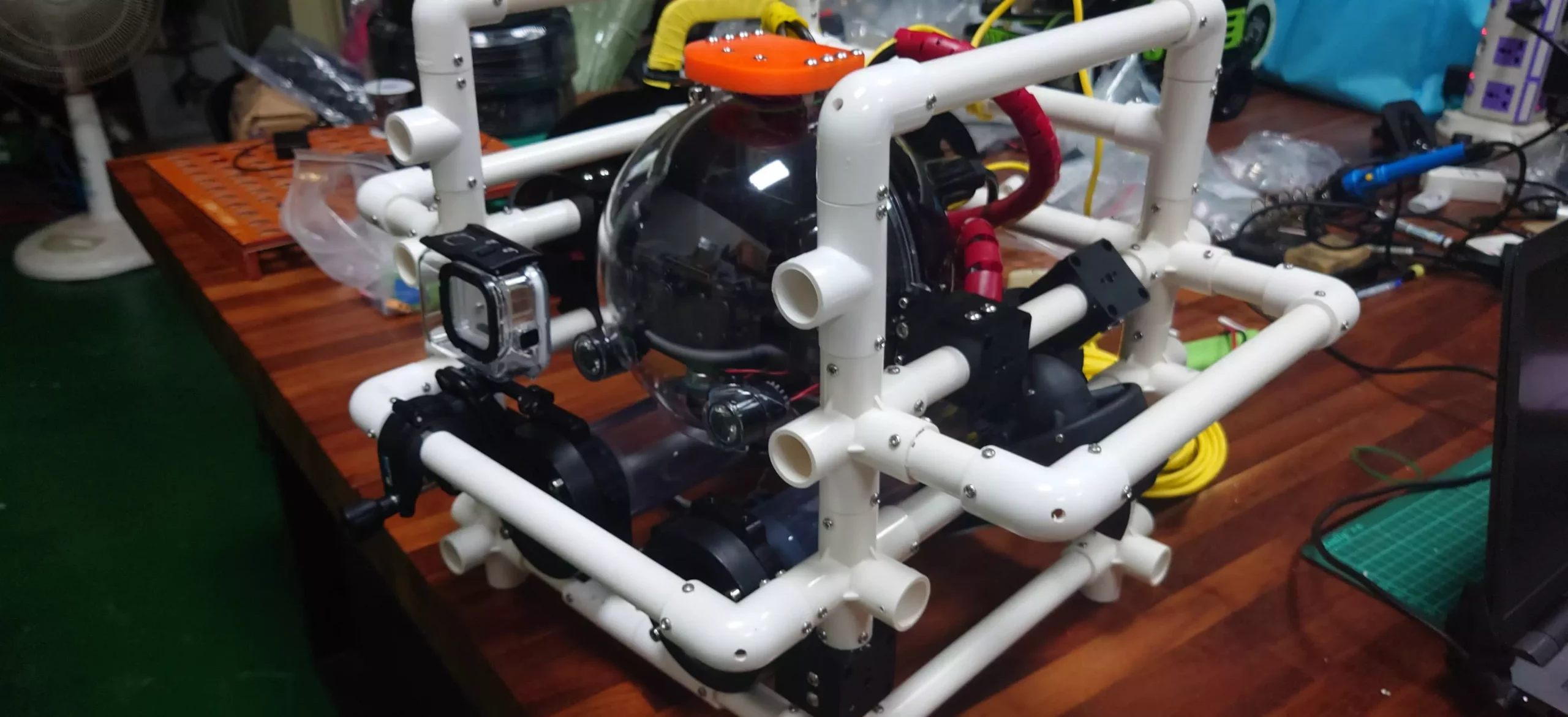
IPANEMA PVC ROV Kit
Underwater image analysis is a very challenging research. Compared with air, water has the characteristics of (1) it is easier to have a turbid environment than air, (2) a larger refractive index (1.33) and (3) a stronger light absorption. The former two make the underwater image easier to blur the image and often have to be defogged; the latter makes the color of the underwater image distorted and must be restored.
Current underwater image analysis focuses on defogging or color restoration of a single underwater image file rather than real-time images. For example, MIT engineers developed a new technology, Sea-thru, which can “drain” underwater photos.
 1")
In addition to restoring actual underwater images, recognition of underwater objects and terrain is also an important topic.
For the analysis of the above-mentioned underwater images, researchers often need to use an underwater robot (ROV) to launch into the water to take pictures. After the ROV comes ashore, the images are copyed and input into a specific computer for research. Such a learning curve is relatively inefficient and long.
If it is used with the existing AI algorithm for real-time underwater image analysis, the original real-time video of the underwater robot must be obtained by a computer language program (for example, python + OpenCV) and AI analysis must be performed at the same time.Let the programming language get real-time images, which often requires the support of the ROV factory. Generally, cheap entertainment ROVs on the market rarely provide such services. Your own DIY ROV has become another choice for these image analysts, and it has also increased related costs.
HORUS waterproof Camera is a new underwater image analysis solution.
It is difficult to obtain real-time video of underwater robots. The main reason is that the ROV real time video is modiefied in the system designed by the manufacturer and translated through the cable to the terminal. It often requires the manufacturer’s modification to obtain the real-time image.
The HORUS waterproof camera can be used as the second or even more auxiliary camera of ROV, which user can obtain more underwater real-time video from different angles. Unlike other underwater cameras such as Gopro, HORUS provide the real time video by its transmission, which can be attached to the control line of the underwater robot, and the provided USB connector allows the computer program running on the laptop to directly read the real-time image and analyze it immediately.
In addition, if the control system of the underwater robot is designed separately from the video system, the complexity and cost of the underwater robot can also be simplified. The combination of Ipanema water pipe ROV and HORUS is a good example.
In the field of image analysis, OpenCV plus Python is one of the most commonly used programming languages, and there are many programming examples on the Internet. Anaconda is a free and open source Python and R language development environment (IDE) that integrates Python’s commonly used data analysis, machine learning, and visualization suites for computational science (data science, machine learning, big data processing, and predictive analysis).
The ROV MAKER team provides code examples of OpenCV + Python programs running on Anaconda. These sample codes introduce how to easily read and process real-time images.from HORUS waterproof Camera. Here is the download link。The running video of the sample program is as follows:
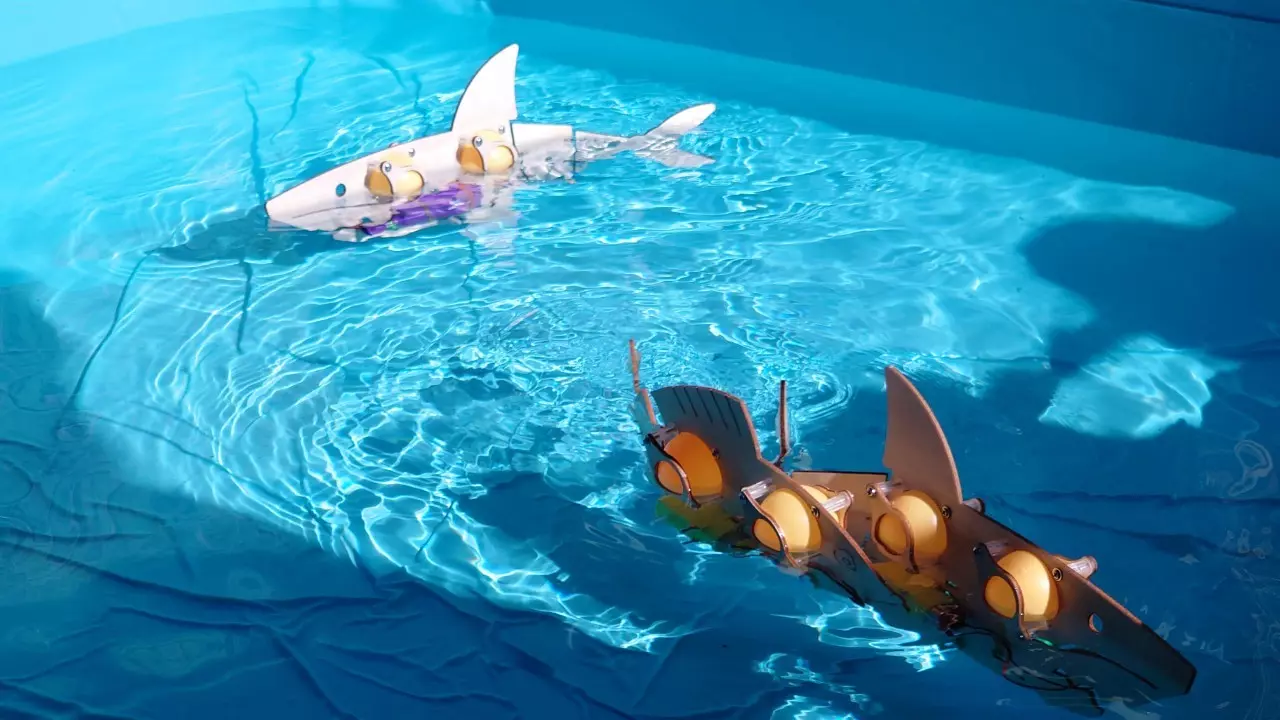
ROV MAKER is currently planing to use STEM ROV with HOURS waterproof camera to as ROV control Starter Program. The concept is to run a python program on the laptop Anaconda, receive the real-time image from HORUS waterproof camera for image processing, and command the STEM ROV according to the result, which can track objects of specific shape or color in the water. Followig is a related concept video: