ROV enlightenment kit, let students start to contact marine science

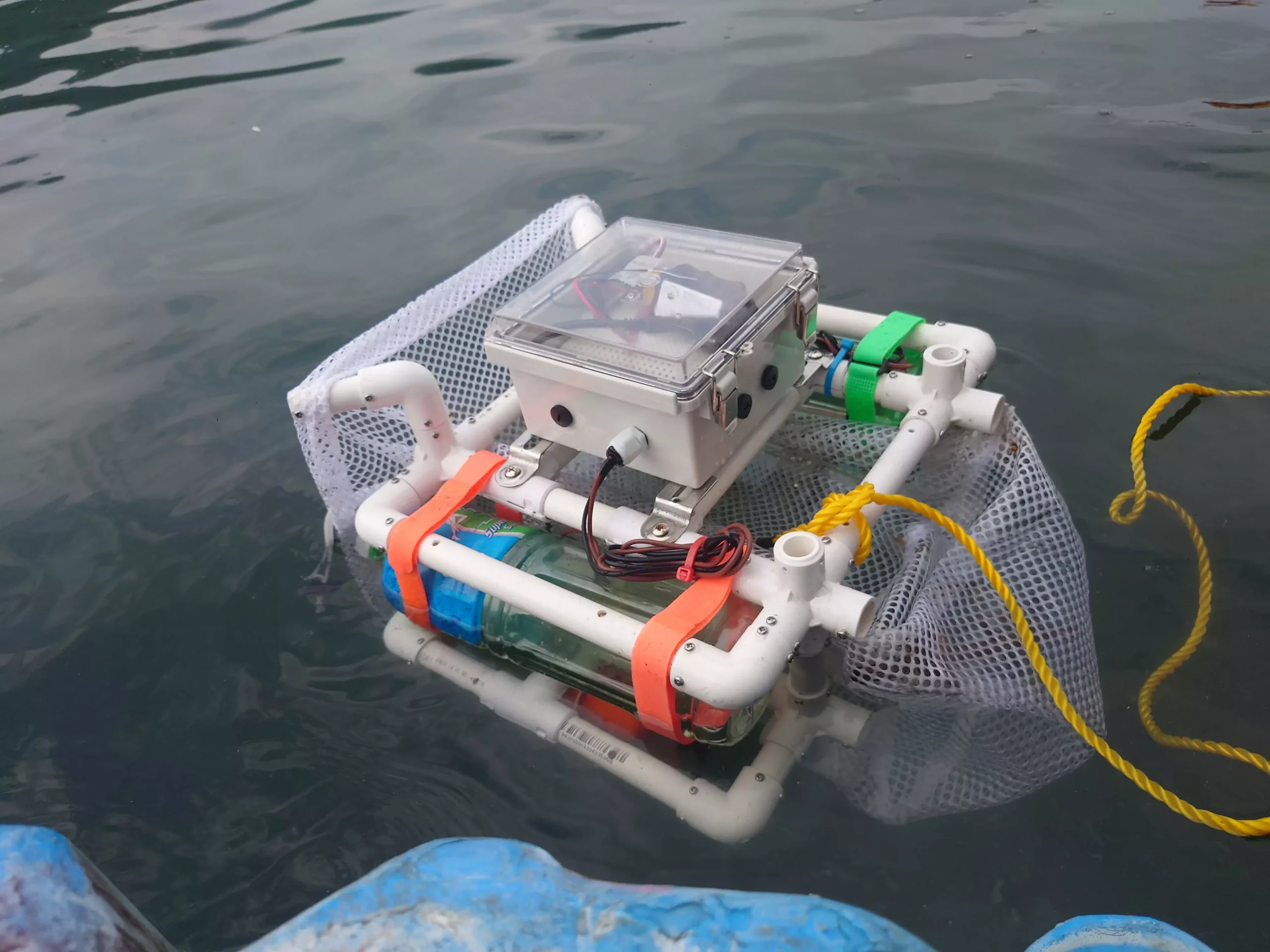
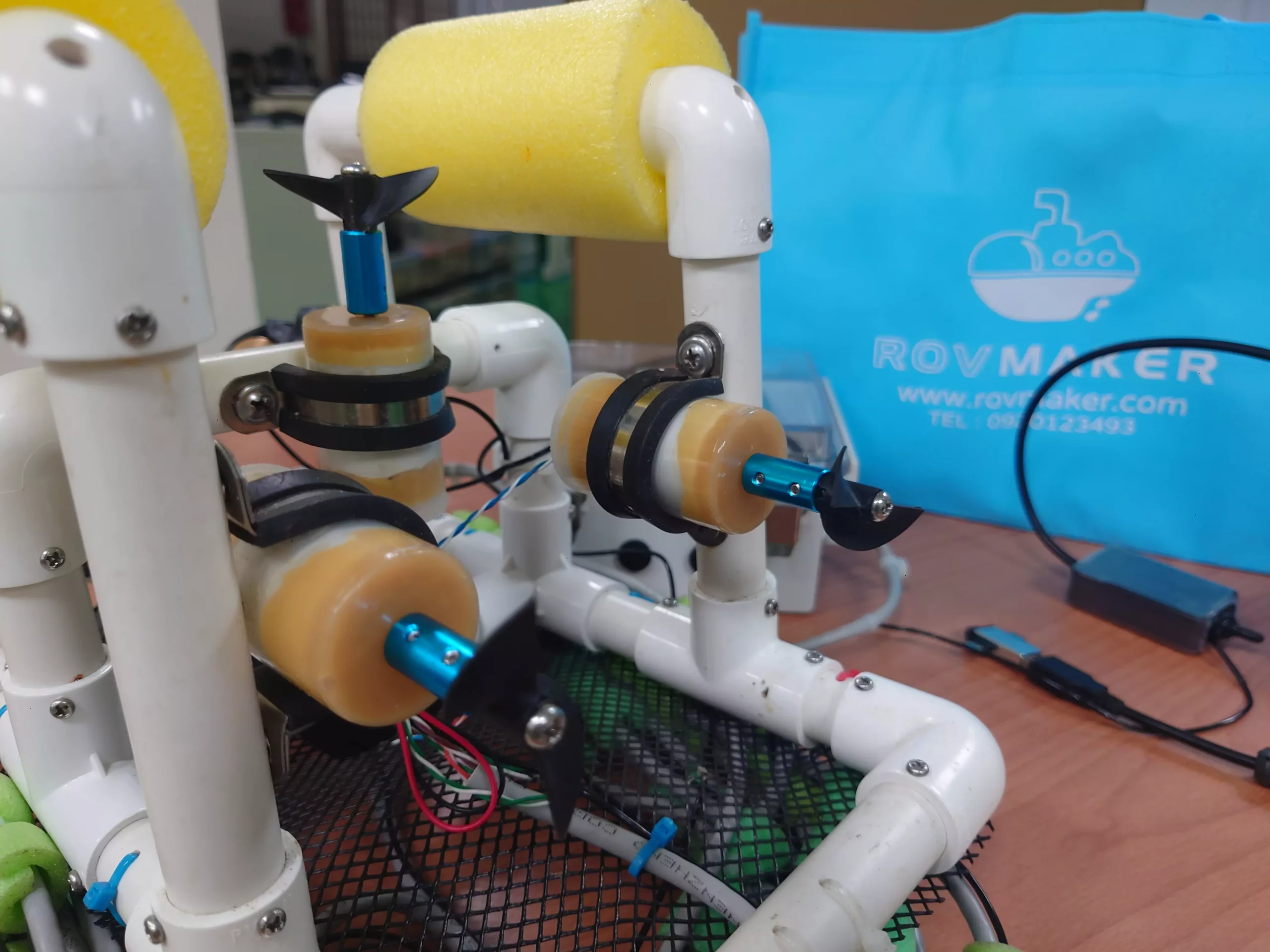
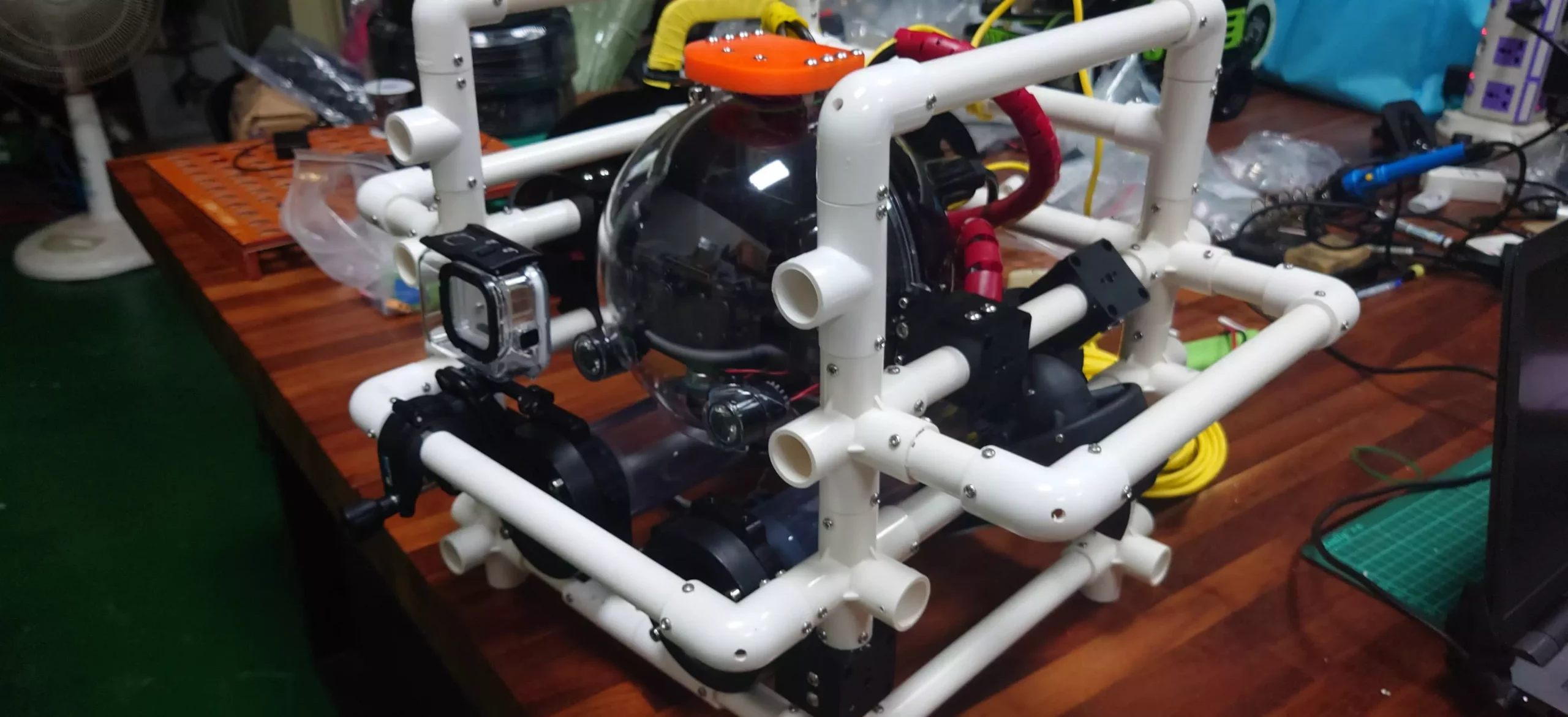
BORG CUBE PVC ROV Kit

IPANEMA PVC ROV Kit
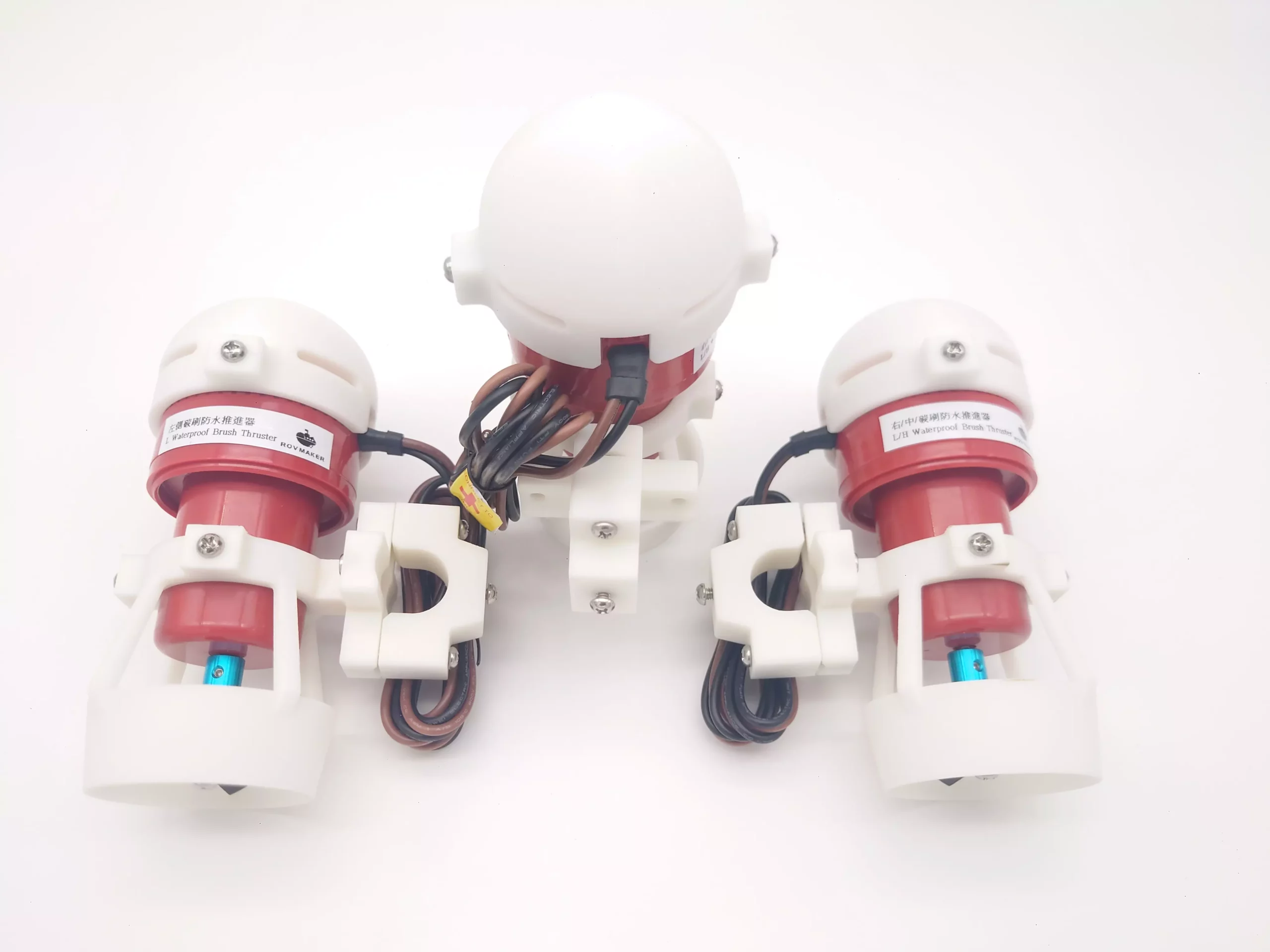
If you are planning to build your own ROV (underwater robot) and are looking for related sensor modules, Mazu sensor modules will be one of your best choices.
To DIY your ROV, you might be faced the challenges of hardware, software integration, and mechanism waterproof design. This article explains how MAZU boardmodules can simplify the challenges you will face in the DIY process.
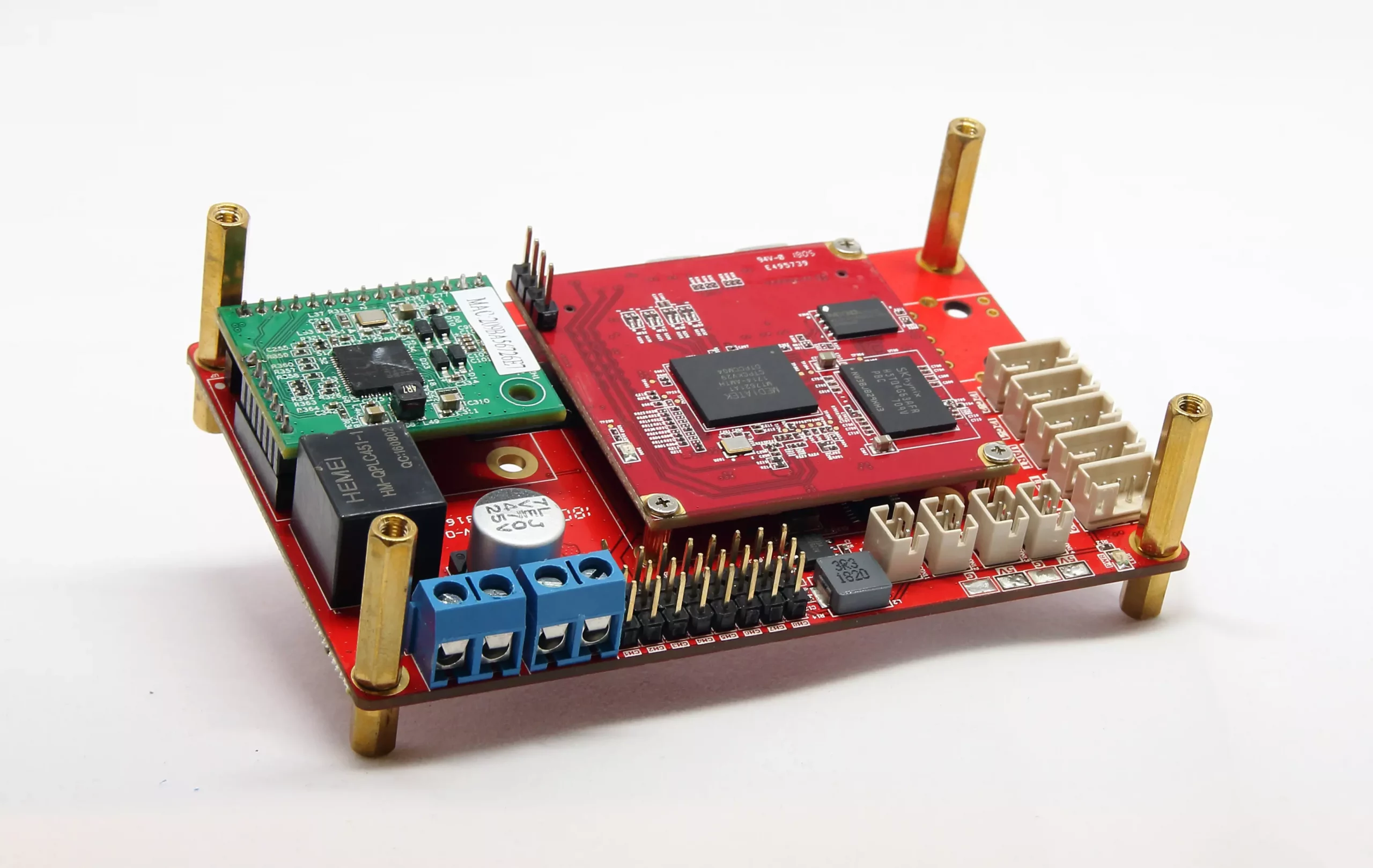
In hardware point of view, the MAZU board is the sensors module specially designed for the ROV DIY. It has been used in ROVMAKER’s own Voyager II ROV. The integrated sensors on it contain an inertial measurement unit (IMU) MPU-9250A and a depth and temperature sensor MS5837-30BA. In addition, the electronic compass IST8310 is added to provide better underwater navigation. And these chips are controlled through a single I2C interface.

In software point of view, the ROV MAKER team provides code examples implemented in Voyager II. It reduces your development effort. You can download it in the download of the official website or click this link directly.
The MAZU Board could provide following navigation data :
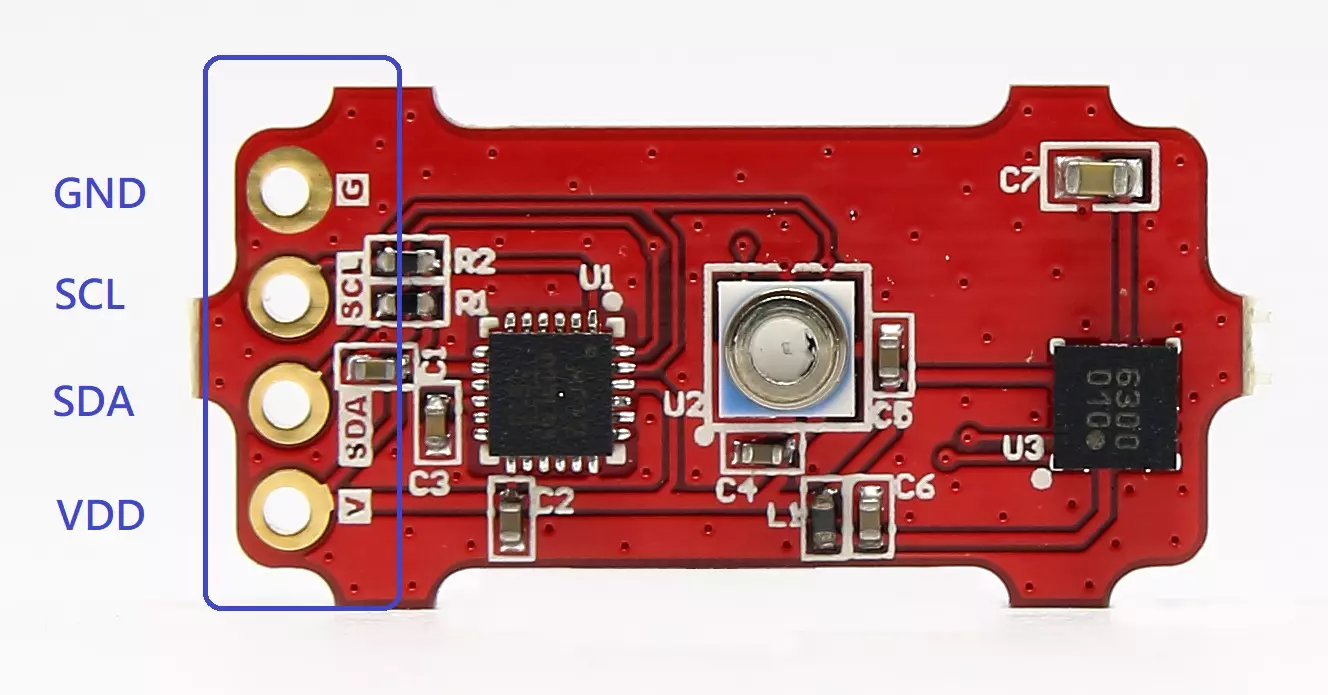
In mechanism point of view, after soldering the wires, Mazu can be placed in the attached acrylic plate, and then epoxy resin A can be injected to the upper edge of the MS5837-30BA white pressure. This design allows Mazu to work normally underwater

In order not to interfere with the electronic compass IST8310, it is recommended that the MAZU board be kept away from the motor or related lines as much as possible
Following is the assembly video of MAZU board for your reference